Automatic check-in rules.
Serves for land, marine or air navigation.
Automatic check-in makes it possible to end navigation automatically when you reach the final waypoint, or to switch automatically to the next target on the route.
Default.
You need to pass through the target: approach it and then, when you are starting to get away from it, check-in happens. Required approach radius is based on your speed (higher speed, bigger radius).
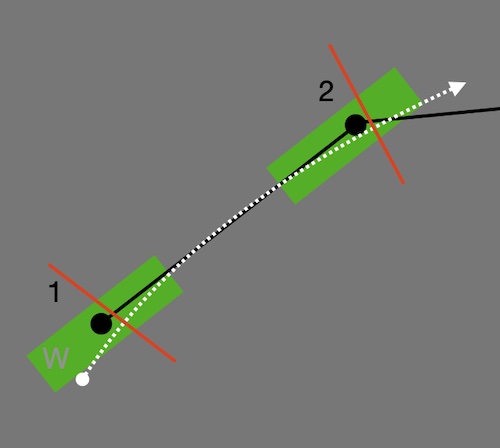
The above image shows the constant width of the approach “rectangle”; in reality this width is calculated continuously based on the current speed. The slower you are, the smaller the approach check-in width is.
Formula for the approach check-in distance (meters) based on speed (m/s) is:
17.0 + 4.2*speed
This has been fitting well into general requirements for the last N years.
Circle.
Check-in happens when you are inside the circle with the defined radius around the target. It takes several location samples to verify that you are inside the circle and switch you to the next target or end navigation.
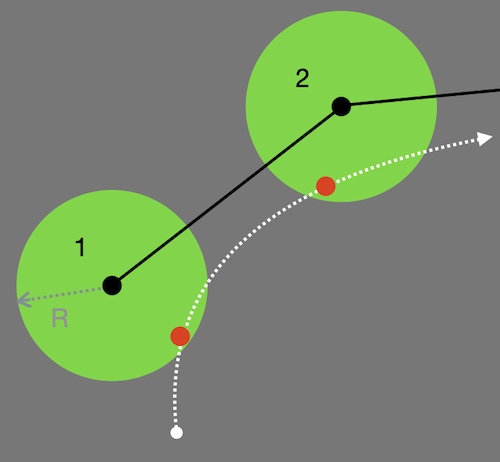
Serves for paragliders. As soon as the app is sure you are inside the target circle (red dots), check-in happens.
You can open these settings via:
Speedometer 55
Settings > Advanced settings > Land Navigation > Automatic check-in rules.
Compass 55
Settings > Navigation > Automatic check-in rules.
Related: