Hız Göstergesi 55. Kara navigasyon ayarları.
Hızlı bir bakışta, navigasyonu ihtiyaçlarınıza göre ayarlamak için aşağıdakiler yapılandırılabilir:
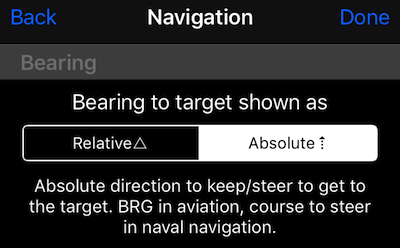
Hedefe göre göreli veya mutlak yön gösterimi
Seçenek 1. Göreli yön. Hedefe göre yönü, mevcut rotanız ile hedefe olan rotadaki farkı gösteren bir göreli rota olarak gösterir:
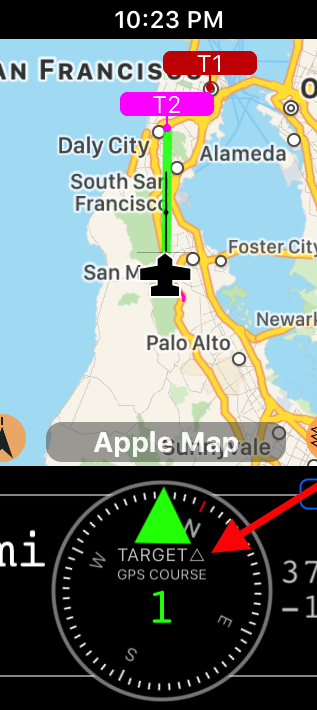
Bu şekilde, gerekli rota ile 1 derece sapma olduğunu görebilir ve buna göre ayarlama yapabiliriz. “Hedef△” ifadesinin, hedefe olan “delta” rotayı kullandığınızı vurguladığını dikkate alın.
Seçenek 2. Mutlak yön. Genellikle BRG veya yön olarak adlandırılır. Hedefe ulaşmak için uçmanız/sürmeniz/yürümemeniz gereken rotayı gösterir:
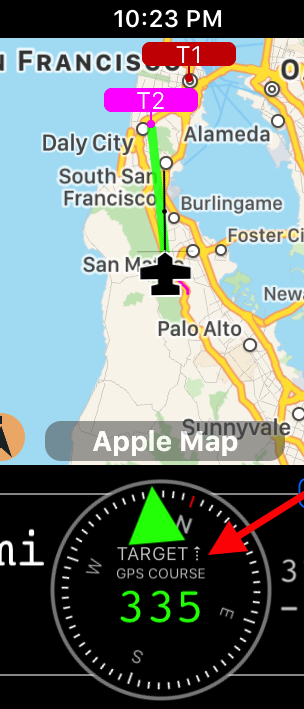
Yukarıdaki örnekte hedefe giden gerekli rota 335 derece ve haritadaki rota çizgisi ile yeşil ok bize bunu söylüyor. Ayrıca eski “Hedef” ifadesinin artık “Hedef⇡” olarak gösterildiğini dikkate alın, bu bir “delta” değil bir “yönlendirme rotası” olduğunu gösteriyor.
Bu iki seçenek arasındaki geçişi Ayarlar > Navigasyon’da bulabilirsiniz:
Gidilen Yola Tahmini Süre (ETE) hesaplama yöntemi
ETE hesaplama için 2 yöntem seçebilirsiniz:
Tüm rotadaki toplam ortalama hızı kullanın
Anlık/şu anki hızı kullanın, yalnızca kısa ve en son zaman aralığındaki hızı ortalayın
“Ayarlar” sekmesini açın, ardından “Navigasyon"u seçin ve tercih ettiğiniz yöntemi seçin:

“Şu anki hız” hesaplama yöntemi, “Toplam hız ortalaması"na göre kesinlikle daha iyi tepki geri bildirimi sağlayacaktır.
İpuçları
Navigasyon yaparken uygulama size bazı görsel/sesli ipuçları verebilir:
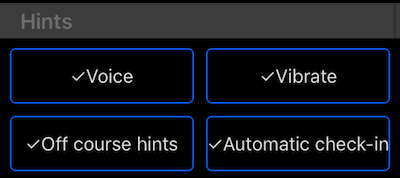
Ses. Ses ipuçlarının verilip verilmeyeceğini belirler. Ses ipuçları “XYZ mil kalan ‘Waypoint 1’” gibi olur.
Titreşim. Ses ipuçlarını kaçırmamak için titreşim kullanılması gerekip gerekmediğini belirler.
Rota sapma ipuçları. Ses ipuçları AÇIK ise, hedefe yaklaşırken sapmaya başladığınızda en fazla yarım dakika içinde “hedef ‘Waypoint 1’ XYZ mil uzakta, 30 derece sola” gibi bir ipucu alırsınız. Böylece rotanızın yanlış olabileceğini ve hangi rota düzeltmesi almanız gerektiğini bilirsiniz.
Otomatik kontrol. Hedefe yaklaşırken uygulama otomatik olarak hedefe ulaşıp ulaşmadığınızı belirler ve ya navigasyonu sonlandırır ya da rotadaki bir sonraki waypoint’e geçer.
İlgili sayfalar: