自動チェックインルール
陸上、海上、航空のナビゲーションでご利用いただけます。
自動チェックイン機能を使うと、最終ウェイポイントに到達した時点でナビゲーションを自動的に終了したり、ルート上の次の目標地点へ自動的に切り替えたりできます。
デフォルト
目標地点を通過する必要があります。目標地点に近づき、その後に離れ始めた瞬間にチェックインが成立します。判定に使われる接近半径は、現在の速度に応じて計算されます(速度が高いほど半径も大きくなります)。
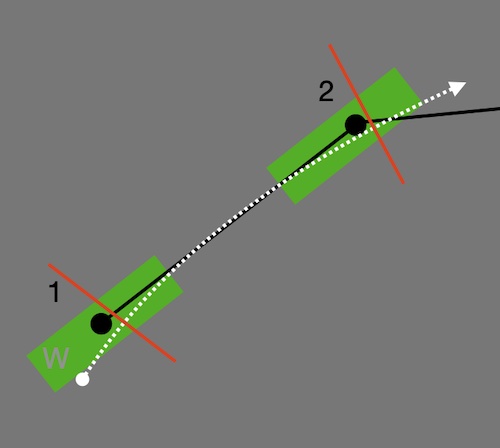
上の図では接近チェックインの「矩形」の幅が一定に見えますが、実際には現在の速度に応じて連続的に計算されています。速度が遅いほど、接近チェック範囲の幅は狭くなります。
速度(m/s)に基づく接近チェックイン距離(メートル)の計算式は次のとおりです。
17.0 + 4.2 * 速度
この式は、これまで一般的な用途で十分に機能してきた値です。
円
目標地点を中心とする、指定半径の円の内側に入ったときにチェックインが成立します。誤判定を避けるため、複数の位置サンプルで円内にいることを確認したうえで、次の目標へ切り替えるか、ナビゲーションを終了します。
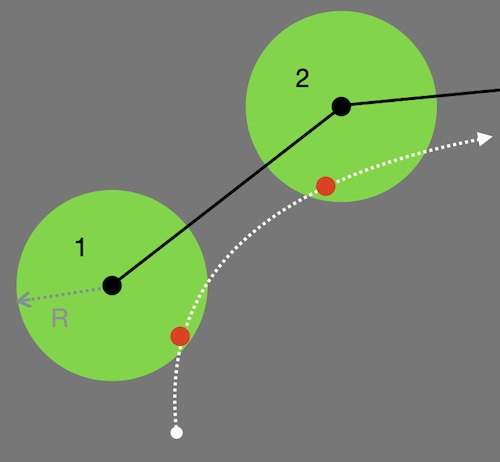
主にパラグライダーでの利用を想定しています。アプリが目標円の内側(赤い点で示される範囲)にいると確実に判断した時点でチェックインが行われます。
これらの設定は、次の場所から開けます。
スピードメーター 55
設定 > 詳細設定 > 陸上ナビゲーション > 自動チェックインルール
コンパス 55
設定 > ナビゲーション > 自動チェックインルール
関連項目: