自動チェックインルール
陸上、海上、航空のナビゲーションに使用します。
自動チェックインでは、最終ウェイポイントに到達したときに自動的にナビゲーションを終了したり、次の目標に自動的に切り替えたりすることが可能です。
デフォルト
目標地点を通過する必要があります。目標地点に近づき、それから離れ始めたときにチェックインが行われます。必要な接近半径は、現在の速度に基づいて計算されます(速度が高いほど、半径も大きくなります)。
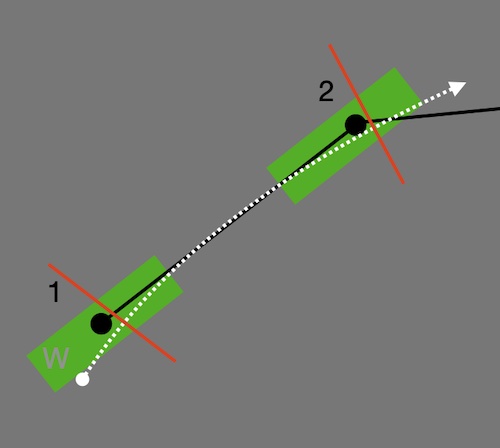
上記の画像は、接近チェックインの「矩形」の幅を示していますが、実際には現在の速度に基づいて連続的に計算されます。速度が遅いほど、接近チェックインの幅は狭くなります。
速度(m/s)に基づいた接近チェックイン距離(メートル)の計算式は次のとおりです:
17.0 + 4.2 * 速度
この計算式は、過去の一般的な要件に適しています。
円
チェックインは、目標地点を中心に定義された半径の円の内部にいるときに行われます。複数の位置サンプルを使用して、円の内部にいることを確認し、次の目標に切り替えたり、ナビゲーションを終了したりします。
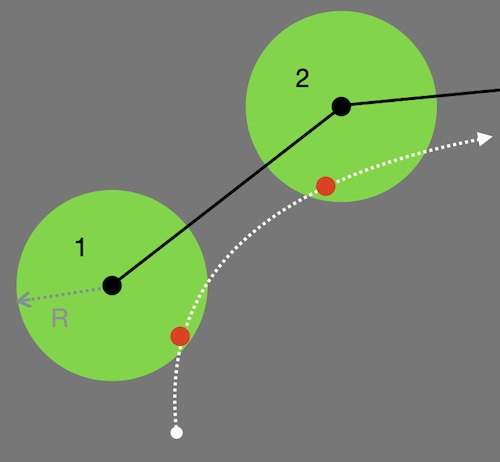
パラグライダーに使用されます。アプリが確実にあなたが目標の円の内部にいると判断した時点で、チェックインが行われます(赤い点が円の内部にあることを示します)。
これらの設定には次のようにアクセスできます:
Speedometer 55
設定 > 詳細設定 > 陸上ナビゲーション > 自動チェックインルール
Compass 55
設定 > ナビゲーション > 自動チェックインルール
関連: