Règles de check-in automatique.
Utilisé pour la navigation terrestre, maritime ou aérienne.
Le check-in automatique permet de mettre fin automatiquement à la navigation lorsque vous atteignez le dernier point de passage, ou de passer automatiquement à la cible suivante sur l’itinéraire.
Par défaut.
Vous devez passer par la cible : approchez-vous-en, puis lorsque vous commencez à vous en éloigner, le check-in se produit. Le rayon d’approche requis est basé sur votre vitesse (plus grande est la vitesse, plus grand est le rayon).
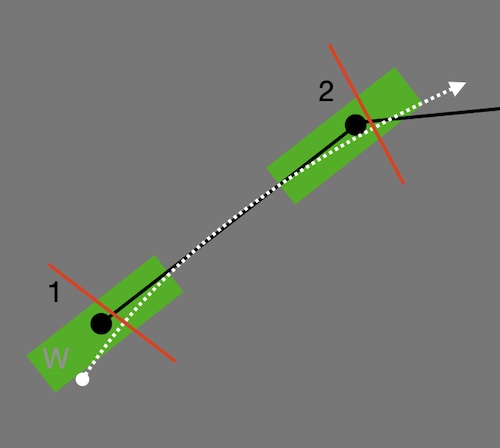
L’image ci-dessus montre la largeur constante du “rectangle” d’approche, en réalité cette largeur est calculée en continu en fonction de la vitesse actuelle. Plus vous êtes lent, plus la largeur de vérification d’approche est réduite.
La formule pour la distance de check-in d’approche (en mètres) basée sur la vitesse (en m/s) est :
17,0 + 4,2*vitesse
Cela s’est bien adapté aux exigences générales au cours des dernières années.
Cercle.
Le check-in se produit lorsque vous êtes à l’intérieur du cercle avec le rayon défini autour de la cible. Plusieurs échantillons de position sont pris pour vérifier que vous êtes à l’intérieur du cercle et vous passer à la cible suivante ou mettre fin à la navigation.
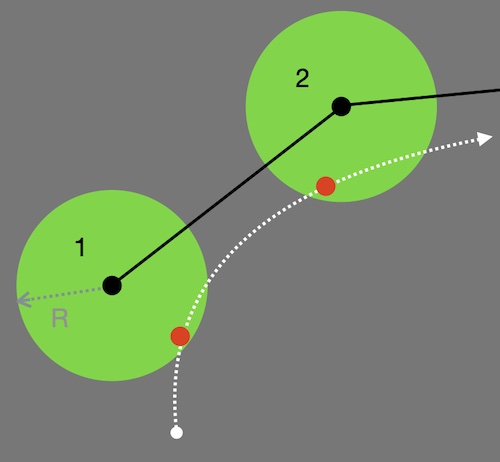
Utilisé pour le parapente. Dès que l’application est sûre que vous êtes à l’intérieur du cercle cible (points rouges), le check-in se produit.
Vous pouvez accéder à ces paramètres via :
Speedometer 55
Paramètres > Paramètres avancés > Navigation terrestre > Règles de check-in automatique.
Compass 55
Paramètres > Navigation > Règles de check-in automatique.
Lié :