Reglas de check-in automático.
Sirve para navegación terrestre, marítima o aérea.
El check-in automático permite finalizar la navegación automáticamente cuando llegas al punto de destino final o cambiar automáticamente al siguiente objetivo en la ruta.
Predeterminado.
Debes pasar a través del objetivo: acércate a él y cuando comiences a alejarte, se produce el check-in. El radio de aproximación requerido se basa en tu velocidad (mayor velocidad, mayor radio).
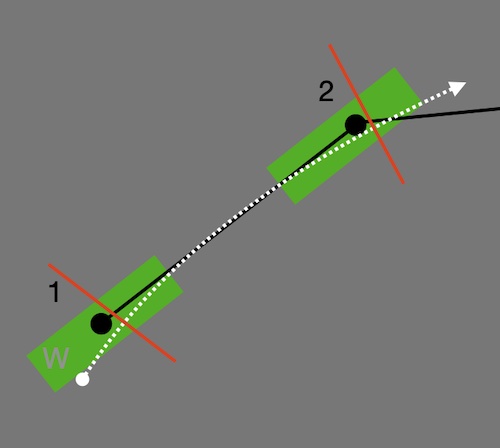
La imagen anterior muestra el ancho constante del “rectángulo” de aproximación, en realidad este ancho se calcula continuamente en función de la velocidad actual. Cuanto más lento seas, menor será el ancho de la verificación de aproximación.
La fórmula para la distancia de aproximación de check-in (en metros) basada en la velocidad (en m/s) es:
17.0 + 4.2*velocidad
Esto se ha ajustado bien a los requisitos generales durante los últimos N años.
Círculo.
El check-in ocurre cuando te encuentras dentro del círculo con el radio definido alrededor del objetivo. Se toman varias muestras de ubicación para verificar que estás dentro del círculo y cambiar al siguiente objetivo o finalizar la navegación.
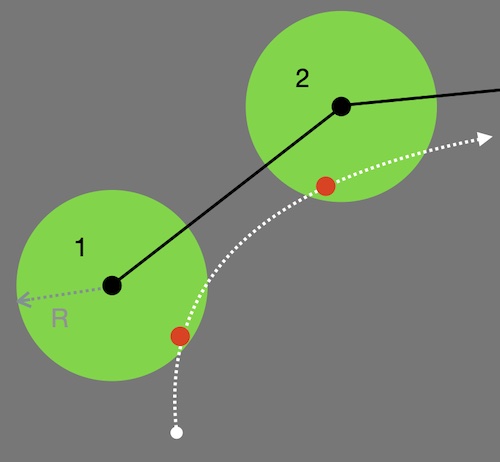
Sirve para parapentes. Tan pronto como la aplicación esté segura de que te encuentras dentro del círculo objetivo (puntos rojos), se produce el check-in.
Puedes acceder a estas configuraciones a través de:
Speedometer 55
Configuración > Configuración avanzada > Navegación terrestre > Reglas de check-in automático.
Brújula 55
Configuración > Navegación > Reglas de check-in automático.
Relacionado: